„TetherIA“ pristatytas „Aero Hand Open“ keičia dirbtinio intelekto robotikos tyrimų dinamiką
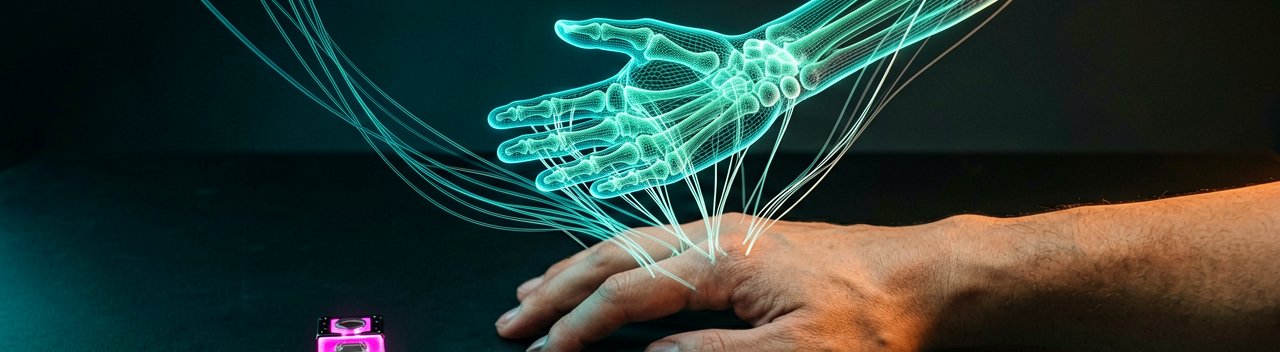
Bendrovė „TetherIA“ oficialiai išleido atvirojo kodo robotizuotą manipuliatorių „Aero Hand Open“, kurio bazinė komponentų kaina (BOM) siekia vos 314 JAV dolerių. Šis žingsnis žymi strateginį lūžį įkūnijamo dirbtinio intelekto (angl. embodied AI) rinkoje, kurioje iki šiol dominavo brangūs, dešimtis ar net šimtus tūkstančių eurų kainuojantys patentuoti sprendimai. Pristatydama visiškai trimatėje erdvėje spausdinamą ir sausgysline pavara grįstą konstrukciją, įmonė tiesiogiai mažina finansinius barjerus nepriklausomiems kūrėjams, akademiniams institutams bei startuoliams, siekiantiems eksperimentuoti su sudėtingomis manipuliacijomis realioje aplinkoje.
Ekspertų vertinimu, šis išleidimas ne tik demokratizuoja prieigą prie pažangios techninės įrangos, bet ir skatina staigų simuliacijos perkėlimo į realybę (angl. sim-to-real) algoritmų tobulėjimą. Kadangi platformos techniniai brėžiniai ir programinė įranga platinami laisvai, tyrėjai gali masiškai replikuoti bandymų stendus, o tai eliminuoja riziką, susijusią su brangios įrangos gedimais. Kaip nurodoma oficialiame projekto puslapyje TetherIA Aero Hand Open, ši mažiau nei 400 gramų sverianti konstrukcija siūlo funkcionalią alternatyvą uždaroms sistemoms, išlaikydama aukštą suderinamumo lygį su populiariausiomis mašininio mokymosi aplinkomis.
Techninis lankstumas ir integracija į dirbtinio intelekto ekosistemas
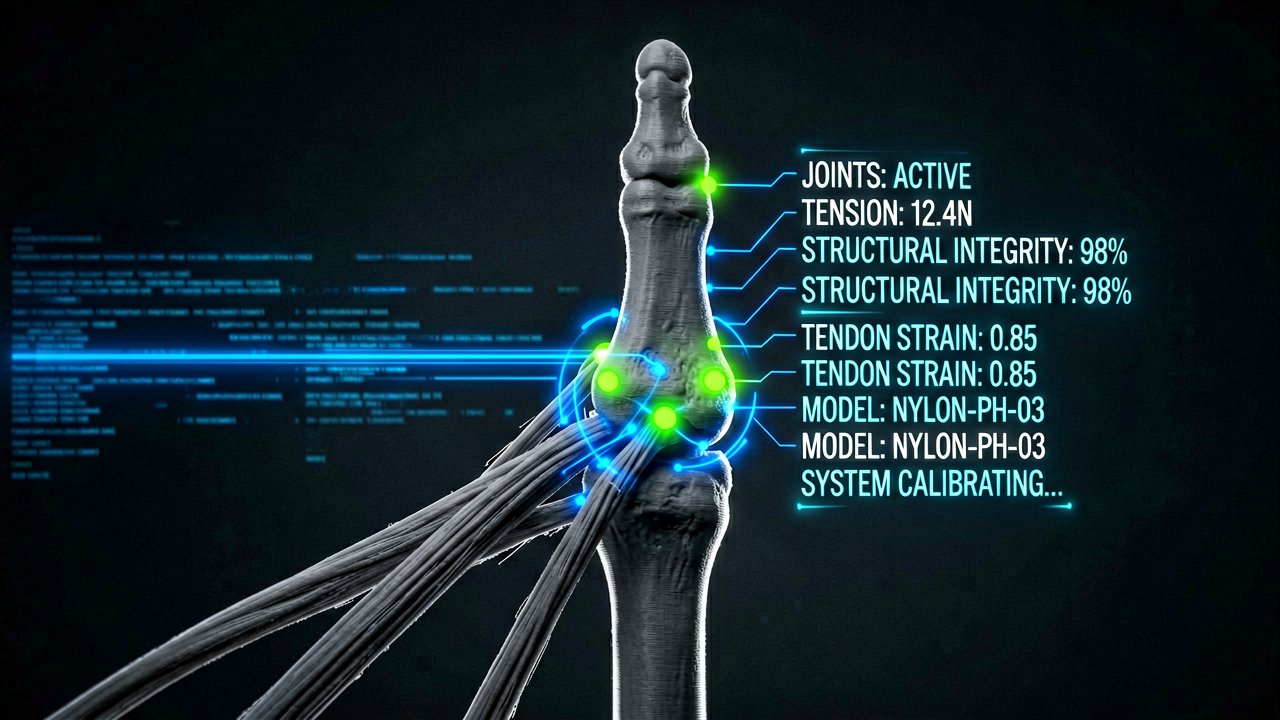
„Aero Hand Open“ turi 7 aktyvius laisvės laipsnius (DOF) ir 16 sąnarių, valdomų naudojant integruotą ESP32-S3 mikrovaldiklį, kuris užtikrina sklandų grįžtamąjį ryšį per USB sąsają. Atvirojo kodo repozitorijoje, esančioje GitHub - TetherIA, pateikiama visa reikalinga dokumentacija, leidžianti sistemą integruoti į ROS2 aplinką bei taikyti pastiprinamojo mokymosi (angl. reinforcement learning) modelius. Tokia architektūra leidžia tyrėjams lengvai programuoti natūralų pirštų lenkimą bei opoziciją, tiesiogiai testuojant neuroninių tinklų generuojamas valdymo trajektorijas fiziniame pasaulyje.
Strateginiai rinkos pokyčiai
Iki šiol manipuliacinės robotikos tyrimus stabdė uždari standartai, todėl tokie sprendimai kaip šis keičia pramonės kryptį link spartesnio bendradarbiavimo, panašiai kaip „Linux“ transformavo operacinių sistemų segmentą. „TetherIA“ sprendimas pateikti paruoštą Python programinės įrangos vystymo rinkinį (SDK), aprašytą gamintojo dokumentacijoje TetherIA Docs, užtikrina, kad inžinieriai gali pradėti kurti valdymo politikas išvengdami žemo lygio aparatinės įrangos programavimo etapų. Ilgalaikėje perspektyvoje tai paspartins autonominių robotų asistentų integraciją tiek paslaugų sektoriuje, tiek pramoninėse tyrimų laboratorijose.
Technologinio proveržio kaina: užkulisių iššūkiai ir realios galimybės
Kas lieka už įprastų pranešimų spaudai ribų: tikrasis „Aero Hand Open“ triumfas yra ne pati kaina, o radikalus požiūrio pakeitimas į robotikos komponentų tiekimo grandinę. Iki šiol pramoniniai manipuliatoriai buvo kuriami naudojant autorinius, sunkiai prieinamus variklius bei uždarų standartų reduktorius, kas priversdavo laboratorijas tapti priklausomomis nuo vieno tiekėjo. „TetherIA“ inžinieriai šią problemą išsprendė pritaikydami konstrukciją masinės gamybos servovarikliams ir standartiniams guoliams, kuriuos galima įsigyti įprastose elektronikos parduotuvėse. Tai reiškia, kad techninės įrangos gyvavimo ciklas ir priežiūra visiškai pereina į pačių tyrėjų rankas, eliminuojant brangius serviso kontraktus.
Akademinės bendruomenės atstovai pabrėžia, kad šis žingsnis tiesiogiai sprendžia vadinamąją „atkuriamumo krizę“ robotikos moksle. Anksčiau skirtingos laboratorijos naudodavo unikalią, pačių modifikuotą įrangą, todėl eksperimentų rezultatai dažnai skirdavosi, o kodas, parašytas vienai sistemai, neveikdavo kitoje. Standartizuota, vos kelis šimtus dolerių kainuojanti platforma leidžia universitetams visame pasaulyje sinchronizuoti savo tyrimus ir tiesiogiai lyginti dirbtinio intelekto modelių efektyvumą identiškose fizinėse sąlygose. Tai sukuria prielaidas kur kas spartesniam kolektyviniam progresui, nes sėkmingai išmokytas neuroninis tinklas gali būti akimirksniu replikuojamas šimtuose kitų institucijų.
Nepaisant akivaizdžių pranašumų, techninės įrangos ekspertai įžvelgia ir tam tikrų inžinerinių kompromisų, kurie lydi tokį drastišką kainos sumažinimą. Trimačiu spausdintuvu pagaminti struktūriniai elementai ir sausgyslinė pavara pasižymi didesniu lankstumu bei mažesniu absoliučiu tikslumu, palyginti su metaliniais pramoniniais analogais. Vis dėlto šiuolaikiniame dirbtinio intelekto kontekste šis trūkumas tampa privalumu, nes priverčia mašininio mokymosi algoritmus prisitaikyti prie netobulos fizinės aplinkos ir mechaninio laisvumo. Tokiu būdu sugeneruoti valdymo modeliai tampa kur kas atsparesni ir lankstesni, o tai yra kritiškai svarbu kuriant robotus, gebančius veikti nenuspėjamose namų ar biuro aplinkose.
Žvelgiant iš ilgalaikės rinkos perspektyvos, „TetherIA“ iniciatyva sukuria rimtą konkurencinį spaudimą komerciniams robotikos gigantams, priversdama juos persvarstyti savo kainodaros strategijas. Startuoliai, kurie anksčiau turėdavo pritraukti milijonines investicijas vien tam, kad sukomplektuotų pradinį tyrimų stendą, dabar gali pradėti veiklą su minimaliu pradiniu kapitalu. Šis pokytis neabejotinai perorientuos rizikos kapitalo fondų dėmesį nuo techninės įrangos finansavimo prie intelektinės nuosavybės ir unikalių valdymo algoritmų kūrimo. Galiausiai, atvirojo kodo ekosistemos plėtra ne tik paspartins komercinių produktų pasirodymą rinkoje, bet ir suformuos naują inžinierių kartą, įgijusią praktinės patirties su pažangiausia įkūnijamo dirbtinio intelekto įranga.
Skeptiškas žvilgsnis į atvirojo kodo utopiją robotikoje
Žvelgiant giliau į skaičius: nors 314 JAV dolerių kaina skamba kaip revoliucija, ji sukuria pavojingą iliuziją apie pigų ir lengvą kelią į pažangios robotikos tyrimus. Ši suma atspindi tik grynąją bazinių komponentų kainą (BOM), neįvertinant šimtų inžinerinių valandų, reikalingų sistemos surinkimui, kalibravimui ir nuolatinei priežiūrai. Universitetų laboratorijos ir startuoliai greitai supras, kad sutaupyti pinigai techninei įrangai yra tiesiog perkialiami į padidėjusias personalo sąnaudas, nes neapmokami studentai ar brangūs tyrėjai privalės dirbti mechanikais, rankiniu būdu remontuojančiais nutrūkusias sausgysles bei stringančius masinės gamybos servovariklius.
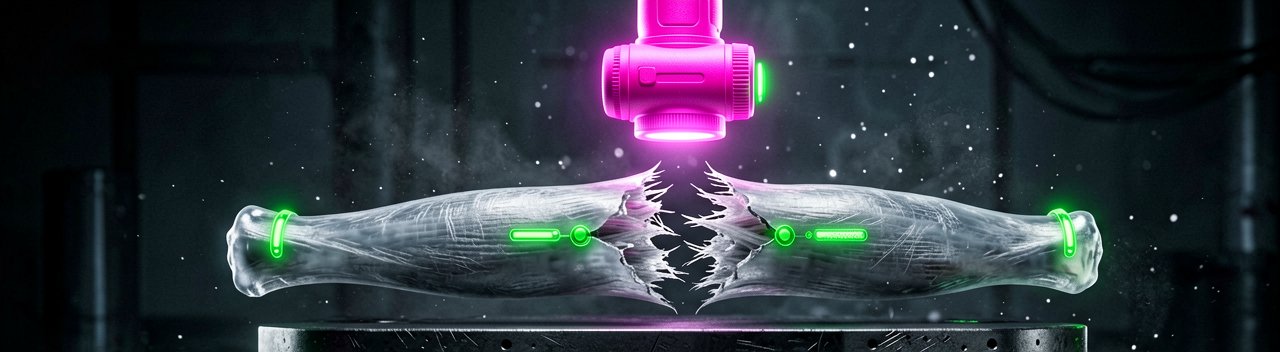
Šis modelis taip pat išryškina gilų prieštaravimą tarp dabartinių dirbtinio intelekto poreikių ir fizinio pasaulio apribojimų. Šiuolaikiniai pastiprinamojo mokymosi algoritmai reikalauja milijonų bandymų iteracijų, kurios simuliacijoje atliekamos per kelias valandas, tačiau realiame pasaulyje jos reiškia neišvengiamą mechaninį nusidėvėjimą. „Aero Hand Open“ konstrukcijoje naudojamas plastikas ir nebrangūs elektronikos komponentai nėra pritaikyti nepertraukiamam, savaites trunkančiam darbui maksimaliomis apkrovomis. Dėl šios priežasties laboratorijos rizikuoja patekti į užburtą ratą, kur duomenų rinkimo procesą nuolat stabdys techniniai gedimai, o surinktų duomenų kokybę gadins dėl plastiko deformacijos kintanti manipuliatoriaus geometrija.
Galiausiai, atvirojo kodo strategija dažnai tampa patogiu būdu permesti kokybės kontrolės naštą galutiniam vartotojui. Komerciniai robotų gamintojai garantuoja mikronų tikslumą ir pateikia sertifikuotus skaitmeninius dvynius (angl. digital twins) simuliacijoms, tuo tarpu „TetherIA“ siūlo platformą, kurios elgsena kiekvienoje laboratorijoje skirsis priklausomai nuo trimačio spausdintuvo nustatymų bei pasirinkto plastiko tipo. Jeigu bendruomenė nesugebės sukurti itin griežtų kalibravimo standartų, šis projektas gali likti tik įdomiu edukaciniu žaislu, o rimti pramoniniai tyrimai ir toliau vyks naudojant brangius, bet prognozuojamus uždarojo kodo manipuliatorius.
„Atvirojo kodo robotika yra puikus būdas suprasti, kad nemokamas sūris būna tik pelėkautuose, o nemokama techninė įranga paprastai reikalauja trijų etatų jos nuolatiniam remontui – tačiau bent jau dabar inžinieriai gali susidoroti su nesėkmėmis už labai prieinamą kainą.“
Vyr. redaktorius Artūras Malašauskas, DI sistemų integratorius, sukaupęs daugiau nei 20 metų patirties kuriant gamybinio lygio žiniatinklio inžinerijos sprendimus. Jis projektavo, diegė ir plėtė verslo klasės „Python“/„PHP“ sistemas logistikos, SaaS bei viešojo sektoriaus klientams. Pastaruosius metus jis specializuojasi išskirtinai DI integracijų srityje: diegia atvirojo kodo didžiuosius kalbos modelius (LLM), kuria generatyvinių medijų (vaizdo, garso, video) srautus bei projektuoja daugiagentines darbo eigas realioms gamybinėms aplinkoms. Jo standartas: atkuriamumas, saugumas ir ekonomiškai efektyvi išvestis – jokio „vaporware“. Artūras dokumentuoja bei vertina naujus DI įrankius, atskirdamas patvirtintas galimybes nuo rinkodarinio triukšmo. Techninis redaktorius svetainėse: ai-naujienos.lt, ai-verslas.lt, muza-ai.eu. Susisiekite per „LinkedIn“.
Komentarai